
Como Encontrar a Reta Perpendicular à Tangente em uma Curva com Aplicações na Física e no Cálculo
Introdução
Você sabia que o conceito de reta tangente e reta perpendicular a ela é a base para entender fenômenos fundamentais da Física, como velocidade e aceleração? Dominar esse tema vai muito além do Cálculo Diferencial — ele é essencial para interpretar o movimento de corpos, projetar trajetórias e até compreender gráficos em engenharia.
Neste post, vamos conectar o conceito de reta tangente, reta perpendicular e suas interpretações físicas por meio de exemplos clássicos da cinemática: o lançamento horizontal no vácuo e o movimento circular uniforme (MCU).
1. O coeficiente angular da reta tangente e o da reta perpendicular
Seja uma curva qualquer representada por uma função  . A reta tangente a essa curva em um ponto
. A reta tangente a essa curva em um ponto  tem como coeficiente angular a derivada da função naquele ponto, ou seja:
tem como coeficiente angular a derivada da função naquele ponto, ou seja:
![\[m_r = \left. \frac{df}{dx} \right|_{x = x_0}\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-48b77de444697bdab39d7f16693c2c26_l3.png "Rendered by QuickLaTeX.com")
Agora, suponha que queremos encontrar uma reta perpendicular a essa tangente, passando pelo mesmo ponto. O que sabemos da geometria analítica é que o produto dos coeficientes angulares de duas retas perpendiculares é -1. Assim, se  é o coeficiente angular da reta perpendicular, temos:
é o coeficiente angular da reta perpendicular, temos:
![\[m_r.m_s=-1\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-2a8bc61d15fe354471220ebcee291276_l3.png "Rendered by QuickLaTeX.com")
![\[m_s=-\frac{1}{m_r}\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-e85e536f393c6b2c432c4865bd47e319_l3.png "Rendered by QuickLaTeX.com")
Essa relação é fundamental para entender como direções perpendiculares se comportam graficamente e analiticamente.
2. Aplicação em Cinemática: Velocidade e Aceleração como Retas Suporte
Na Física, especialmente na Cinemática, quando descrevemos a posição de uma partícula no plano por:
![\[\overrightarrow{s}(t)=(x(t),y(t))\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-69b6a8b54f71884e63682752249a9cb2_l3.png "Rendered by QuickLaTeX.com")
A velocidade instantânea é o vetor derivada da posição:
![\[\overrightarrow{v}(t)=\frac{d\overrightarrow{s}}{dt}=(\frac{dx}{dt},\frac{dy}{dt})\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-e932009c7ef8bdb9544764c935470eac_l3.png "Rendered by QuickLaTeX.com")
Geometricamente, a reta tangente à trajetória no instante  é a reta suporte desse vetor de velocidade. Já a aceleração é a derivada da velocidade:
é a reta suporte desse vetor de velocidade. Já a aceleração é a derivada da velocidade:
![\[\overrightarrow{a}(t)=\frac{d\overrightarrow{v}}{dt}=(\frac{d^2x}{dt^2},\frac{d^2y}{dt^2})\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-d9d2e19a2e48eaa39e6d7338444d2800_l3.png "Rendered by QuickLaTeX.com")
E uma propriedade importante: a reta suporte do vetor aceleração é perpendicular à reta da velocidade quando o movimento tem curvatura constante, como em lançamentos balísticos.
Ou seja, no plano  , temos novamente:
, temos novamente:
![\[m_v*m_a=-1\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-c4069aa28b06e48ef93720efaa9f16f7_l3.png "Rendered by QuickLaTeX.com")
Essa condição nos permite relacionar o comportamento da trajetória com seus vetores de velocidade e aceleração por meio de derivadas.
3. Exemplo: Lançamento Horizontal no Vácuo
Vamos aplicar essa teoria em um exemplo clássico da Física: o lançamento horizontal no vácuo, desprezando a resistência do ar.
Dados do problema:
- A partícula é lançada horizontalmente com velocidade constante

- A gravidade atua verticalmente com

- A altura inicial é

a) Equações paramétricas:


b) Tempo total de queda:
Para encontrar quando a partícula atinge o solo:
![\[0 = 5 - \frac{1}{2}gt^2 \quad \Rightarrow \quad t = \sqrt{\frac{10}{g}}\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-d6eff13aeb0f5c7802d7f14148ad1679_l3.png "Rendered by QuickLaTeX.com")
c) Eliminação do tempo:
Podemos reescrever a posição  em função de
em função de  , isolando
, isolando  :
:
![\[y(x) = 5 - \frac{1}{2}g(\frac{x}{10})^2=5 - \frac{g}{200}x^2\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-02cf65afde1679cbb19415979cb362ec_l3.png "Rendered by QuickLaTeX.com")
Esta é a equação da trajetória da partícula.
d) Derivadas:
A derivada da função  fornece o coeficiente angular da reta tangente (suporte da velocidade):
fornece o coeficiente angular da reta tangente (suporte da velocidade):
![\[\frac{dy}{dx} = -\frac{g}{100}x\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-80601fdf59484ebdef3b19b13cd14ead_l3.png "Rendered by QuickLaTeX.com")
A segunda derivada fornece o coeficiente angular da reta suporte da aceleração:
![\[\frac{d^2y}{dx^2} = -\frac{g}{100}\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-06fce92a26392e11c71fa20a9dc5c9c9_l3.png "Rendered by QuickLaTeX.com")
Multiplicando as derivadas:
![\[\left( \frac{dy}{dx} \right) \cdot \left( \frac{d^2y}{dx^2} \right) = \left( -\frac{g}{100}x \right) \cdot \left( -\frac{g}{100} \right) = \frac{g^2}{10\,000}x\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-850b184511e424909341850d691ed9d7_l3.png "Rendered by QuickLaTeX.com")
Para o ponto em que  , temos:
, temos:
![\[\left( \frac{dy}{dx} \right) \cdot \left( \frac{d^2y}{dx^2} \right) = \frac{g}{100}\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-f5dc5961f0311b4f3a03140ce08e2d98_l3.png "Rendered by QuickLaTeX.com")
Mas atenção: a condição  é idealizada para movimentos com curvatura constante. No lançamento horizontal, isso não vale para qualquer ponto, mas a geometria dos vetores ainda se preserva no espaço vetorial.
é idealizada para movimentos com curvatura constante. No lançamento horizontal, isso não vale para qualquer ponto, mas a geometria dos vetores ainda se preserva no espaço vetorial.
4. Exemplo: Movimento Circular Uniforme
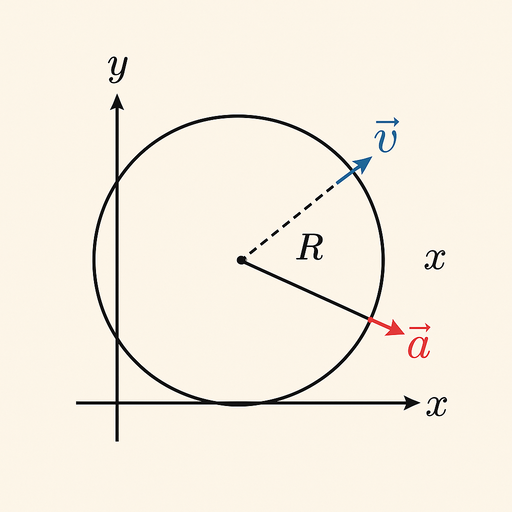
Agora vamos analisar o caso clássico onde a perpendicularidade é garantida em todos os instantes: o movimento circular uniforme (MCU), com raio constante  e velocidade de módulo constante.
e velocidade de módulo constante.
a) Equações paramétricas da trajetória circular:
Em coordenadas cartesianas, temos:
![\[x(t) = R \cos(\omega t), \quad y(t) = R \sin(\omega t)\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-1c8d0a72bbeb2ecb939170744f52ed63_l3.png "Rendered by QuickLaTeX.com")
b) Vetores velocidade e aceleração:
A velocidade:
![\[\vec{v}(t) = \left( -R\omega\sin(\omega t), \; R\omega\cos(\omega t) \right)\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-8a0d23dd42cddddd73659315fabc82a1_l3.png "Rendered by QuickLaTeX.com")
A aceleração:
![\[\vec{a}(t) = \left( -R\omega^2\cos(\omega t), \; -R\omega^2\sin(\omega t) \right)\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-644981730b77b3c5dd7cb7c192a8644c_l3.png "Rendered by QuickLaTeX.com")
Podemos observar que:
 é tangente ao círculo
é tangente ao círculo é radial, apontando para o centro (aceleração centrípeta)
é radial, apontando para o centro (aceleração centrípeta)
c) Coeficientes angulares:
Vamos encontrar o coeficiente angular da reta tangente (velocidade):
![\[m_v = \frac{dy/dt}{dx/dt} = \frac{R\omega\cos(\omega t)}{-R\omega\sin(\omega t)} = -\cot(\omega t)\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-a6c4f402e7e8eeade1391140c7d6227c_l3.png "Rendered by QuickLaTeX.com")
Agora o coeficiente angular da aceleração (reta suporte do vetor centrípeta):
![\[m_a = \frac{d^2y/dt^2}{d^2x/dt^2} = \frac{-R\omega^2\sin(\omega t)}{-R\omega^2\cos(\omega t)} = \tan(\omega t)\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-f10427ffab21649e89c0494999ccbb64_l3.png "Rendered by QuickLaTeX.com")
Multiplicando:
![\[m_v \cdot m_a = (-\cot(\omega t)) \cdot (\tan(\omega t)) = -1\]](https://www.essenciadocalculo.com/wp-content/ql-cache/quicklatex.com-ccff2775157f964603211f5a78d9d31c_l3.png "Rendered by QuickLaTeX.com")
Resultado esperado: As retas suporte dos vetores  e
e  são perpendiculares em todos os instantes.
são perpendiculares em todos os instantes.
Esse é o exemplo perfeito onde a condição é sempre válida, reforçando a interpretação geométrica das derivadas e o comportamento vetorial em MCU.
Conclusão
A conexão entre derivadas, retas tangentes, retas perpendiculares e movimento físico é profunda e essencial no estudo de Cálculo e Engenharia. Saber que a tangente representa a direção da velocidade e a perpendicular a ela pode representar a aceleração (em certas condições) ajuda a interpretar graficamente e analiticamente problemas reais.
E mais: dominar essas ideias torna mais clara a relação entre Geometria, Cálculo e Física, uma habilidade indispensável para quem está estudando para vestibulares, ENEM ou entrando em cursos de engenharia.
Leave a Reply